Ex: 1
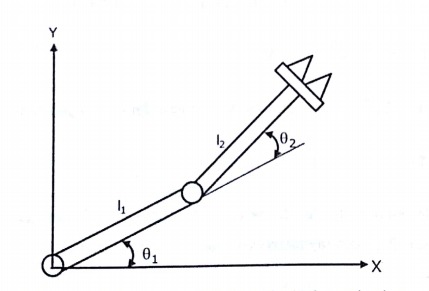
Şekilde RR eklem yapısına, iki serbestlik derecesine sahip bir robot veriliyor. Bu robotun ters kinematiğini çözüp çözüm kümelerini bulunuz.
Şekilde RR eklem yapısına, iki serbestlik derecesine sahip bir robot veriliyor. Bu robotun ters kinematiğini çözüp çözüm kümelerini bulunuz.
θ2 = NaN°
θ2 = ± NaN açısının pozitif veya negatif değerinin cosinüsü aynı olduğundan birinci eklem değişkeni
θ1 ifadesini bulmak için θ2 = NaN° alalım.
θ1 = NaN±NaN°
Resimdaki robot için toplam dört farklı çözüm kümesi elde ettik. Bu çözüm kümeleri aşağıda verilmiştir.
Ç1 = { θ1 = NaN±NaN = NaN° θ2 = +NaN° }
Ç2 = { θ1 = NaN±NaN = NaN° θ2 = -NaN° }
Ç3 = { θ1 = NaN±NaN = NaN° θ2 = +NaN° }
Ç4 = { θ1 = NaN±NaN = NaN° θ2 = -NaN° }