Ex: 5
Şekilde Euler bilekli altı serbestlik derecesine sahip bir robot (SCARA) veriliyor. Bu robotun ters kinematiğini çözüp çözüm kümelerini bulunuz.
Şekilde Euler bilekli altı serbestlik derecesine sahip bir robot (SCARA) veriliyor. Bu robotun ters kinematiğini çözüp çözüm kümelerini bulunuz.
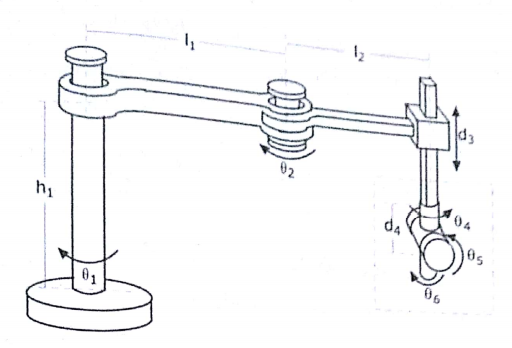
- Dönel eklem değişkeni θ1, denklem 4.44'deki (1,4) v2 (2,4) karşılıklı matris elemanlarının eşitlenmesiyle bulunur.
θ1 = NaN° ............... (4.37)
θ1 = NaN° ............... (4.37)
Görüldüğü gibi birinci eklem değişkeni için θ1 = NaN ve θ1 = NaN gibi iki farklı açı elde ettik. İkinci iklem değişkeni bulmak için birinci eklem değişkeninini θ1 = NaN alalım.
- Dönel eklem değişkeni θ2'de denklem 4.44'deki (1,4) ve (2,4) karşılıklı matris elemanlarının eşitlenmesiyle aşağıdaki gibi bulunur.
θ2 = NaN°
θ2 = NaN°
Görüldüğü gibi birinci eklem değişkeni için θ2 = NaN° ve θ2 = NaN° gibi iki farklı açı elde ettik. İkinci iklem değişkeni bulmak için birinci eklem değişkeninini θ2 = NaN alalım.
- Prizmatik eklem değişkeni d3 denklem 4,4'deki (3,4) karşılıklı matris elemanlarının eşitlenmesiyle aşağıdaki gibi bulunur.
d3 = h1 -Pz _ d4 .
d3 = 0
Rxyz( λ , β ) =
Denklem 4.5'ten faydalanarak uç işlevcisinin kartezyen uzayda yönelimini belirleyen son üç eklem değişkeni θ4 , θ5 ve θ6'yı bulalım. 6T = 3T.4T.5T.6T ............... (4,40) - Dönel eklem değişkeni θ5, denklem 4.48'deki (3,3) karşılıklı matris elemanlarının eşitlenmesiyle aşağıdaki gibi bulunur. θ5 = 180° θ5 = -180° Görüldüğü gibi birinci eklem değişkeni için θ5 = 180 ve θ5 = -180 gibi iki farklı açı elde ettik. İkinci iklem değişkeni bulmak için birinci eklem değişkeninini θ5 = 180 alalım. - Dönel eklem değişkeni θ4, denklem 4.48'deki (1,3) ve (2,3) karşılıklı matris elemanlarının eşitlenmesiyle aşağıdaki gibi bulunur. θ4 = NaN° θ4 = NaN° Görüldüğü gibi birinci eklem değişkeni için θ4 = NaN ve θ4 = NaN gibi iki farklı açı elde ettik. İkinci iklem değişkeni bulmak için birinci eklem değişkeninini θ4 = NaN alalım. - Dönel eklem değişkeni θ6, denklem 4.48'deki (3,1) ve (3,3) karşılıklı matris elemanlarının eşitlenmesiyle aşağıdaki gibi bulunur. θ6 = -180° θ6 = 0° Görüldüğü gibi birinci eklem değişkeni için θ6 = -180 ve θ6 = 0 gibi iki farklı açı elde ettik. İkinci iklem değişkeni bulmak için birinci eklem değişkeninini θ6 = -180 alalım.